Am Hafen muss Streuner natürlich an das normale Stromnetz angeschlossen werden um die Batterien zu laden und den Fön benutzen zu können. Dafür haben wir einen Sicherungskasten eingebaut und Steckdosen direkt neben der Pantry installiert.
Auch eine Phasenkontrolle (angelehnt an die Philippi Schaltung) ist installiert. Um Brandgefahr vorzubeugen sind nur Markenprodukte verbaut und der Schaltkasten sollte die nächsten 46 Jahre problemlos halten.
Als nächstes arbeiten wir uns in der Spannung runter und installieren die 12V Elektrik mitsamt aller Lampen …
Bevor wir das Überwasserschiff neu lackieren können, muss das ausgekreidete gelbe GFK mit Interprotect grundiert werden.
Vergangenes Wochenende haben wir dies in Angriff genommen. Bevor wir grundieren konnten, haben wir das Boot nochmals angeschliffen und gereinigt, sowie mit einem Staubbindetuch vorbereitet. Nach einer Nacht Trocknung wurden die noch offenen Poren und Unebenheiten mit Epoxy gespachelt.
Nun kann nach erneutem Schleifen die Vorstreichfarbe appliziert werden, dies ist aber ein eigener Eintrag …
Dies ist mein vierter Post zum Raspberry Pi und wahrscheinlich auch mein letzter.
Soviel vorab: Der kleine Raspberry macht einfach nur Spaß und eignet sich für alle die gerne ein wenig basteln.
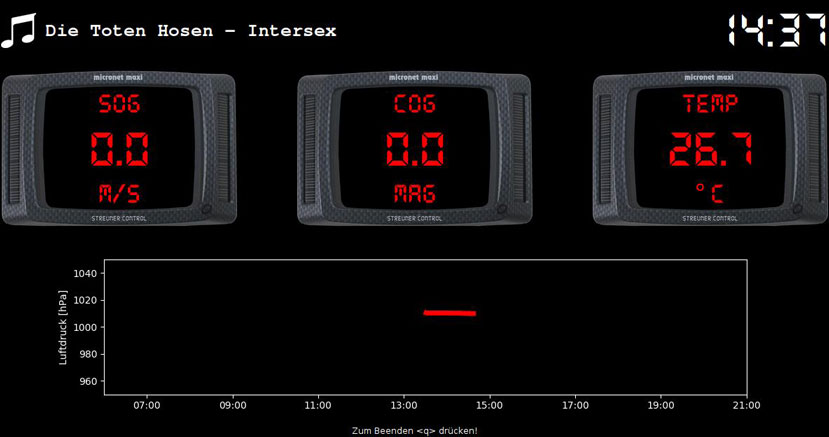
Als letzten Schritt wollte ich mir eine kleine Anwendung schreiben, die mir die Daten der angeschlossenen Sensoren übersichtlich darstellen kann. Es sollte kein neu geschriebener Plotter sein (ist von einer Person eh nicht zu schaffen), sondern eine schnelle Übersicht über wesentliche Parameter. Orientiert habe ich mich dabei an den Instrumenten für Reggattaboote. So sollten Geschwindigkeit, Kurs und Wetterdaten angezeigt werden. Um den Wetterchip voll ausnützen zu können, wäre eine Barograph auch nicht schlecht.
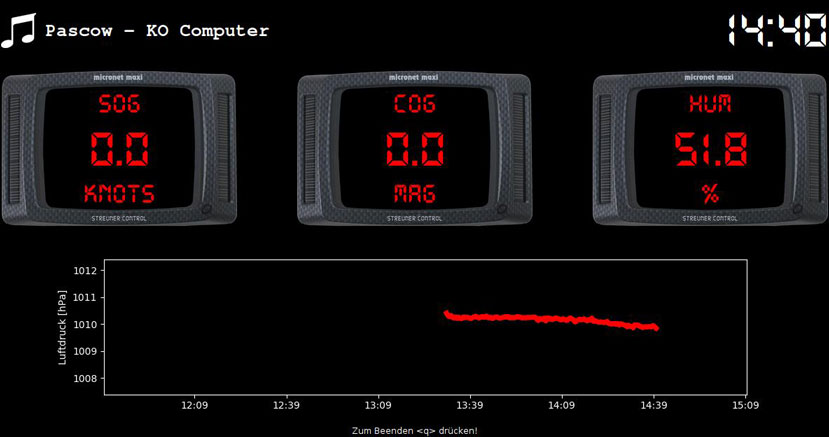
Ich habe das Ganze der Einfachheit halber mit python (obwohl ich wirklich kein Freund der Sprache bin) und dem Fenstermanager tkinter implementiert. Um den Barographen umzusetzen, habe ich ein Miniprogramm geschrieben, welches die Luftdruckdaten in eine Datei schreibt. Dieser datalogger beginnt für jeden Tag eine neue Datei und öffnet die bestehende, sofern bereits vorhanden. Sehr praktisch, schnell und effizient. Das Programm selbst zeigt mir diese Daten mit Matplotlib über einen festgelegten Zeitraum an. Dabei kann ich mit <+> eine vergrößerte Ansicht erhalten (siehe Bild 2) und mit <-> wieder in die Übersichtsansicht gelangen. Die Geschwindigkeit kann in m/s (gute SI-Einheiten) und der gebräulichen Knoten dargestellt werden. Die Luftfeuchtigkeit teilt sich das Display mit der Temperatur (siehe Bilder).
Als kleiner Abschlussgimmick zeigt das Programm den aktuellen Titel von rhythmbox an.
Alles in allem bin ich sehr zufrieden. Allerdings ist das Programm nur eine Vorabversion und wird durch eingehende Praxisphasen hoffentlich noch verändert und optimiert.
Nach sechs Tagen voller Schleifstaub und extremer Hitze, war das Lackieren des Unterwasserschiffes bei moderaten Temperaturen fast eine Wohltat.
Als Grundierung, sowohl für den Rumpf als auch für den Kiel, haben wir VC Tar2 benutzt und hoffen auf eine gute Versiegelung. Dabei haben wir leider in der letzten Schicht zuviel Verdünner verwendet und durch Ausgasen sind an manchen Stellen Poren entstanden. Sieht nicht toll aus, aber da fünf funktionstüchtige Schichten Tar2 unter den Poren liegen, sollte die Osmoseprophylaxe gegeben sein.
Zum Schluss kamen noch zwei Schichten VC 17m als Antifouling zum Einsatz. Und dann der große Moment: Abklebung entfernen und freuen 🙂
Unseren Sommerurlaub wollten wir dieses Jahr sinnvoll nutzen, indem wir unserem Streuner einen neuen Farbaufbau verpassten.
Geplant war alle alten Farbanstriche und Grundierungen abzuschleifen und dem Unterwasserschiff mit VC Tar2 eine Osmoseprophylaxe zu gönnen. Der Überwasserbereich sollte erst mit Interprotect grundiert und mit einem schönen dunkelgrünen Hochglanzlack veredelt werden.
Geplant hatten wir 1,5 Wochen und es ging los mit den Schleifarbeiten, für die wir zwei Tage ansetzten. Nach sechs Tagen und glücklicherweise vielen Helfern hatten wir endlich alle Farbschichten abgetragen. Hierbei sind eine gute Schleifmaschine und viele viele viele Schleifscheiben (NIEMALS aus dem Baumarkt) unabdinglich! Der Unterwasserbereich ist sehr schwer zugänglich und verursachte unzählige blaue Flecken. Insbesondere da der Kiel mit dem Winkelschleifer abgeschliffen werden musste, um danach mit einem Rostumwandler behandelt zu werden.
Am Ende des sechsten Tages war es soweit, und wir konnten die erste Schicht Grundierung im Unterwasserbereich auftragen.
Zum Glück stand das Boot sicher auf dem Kiel, so dass ein diagonales Entfernen der Stützen „problemlos“ möglich war.
Als nächstes stehen die übrigen Farbschichten an …
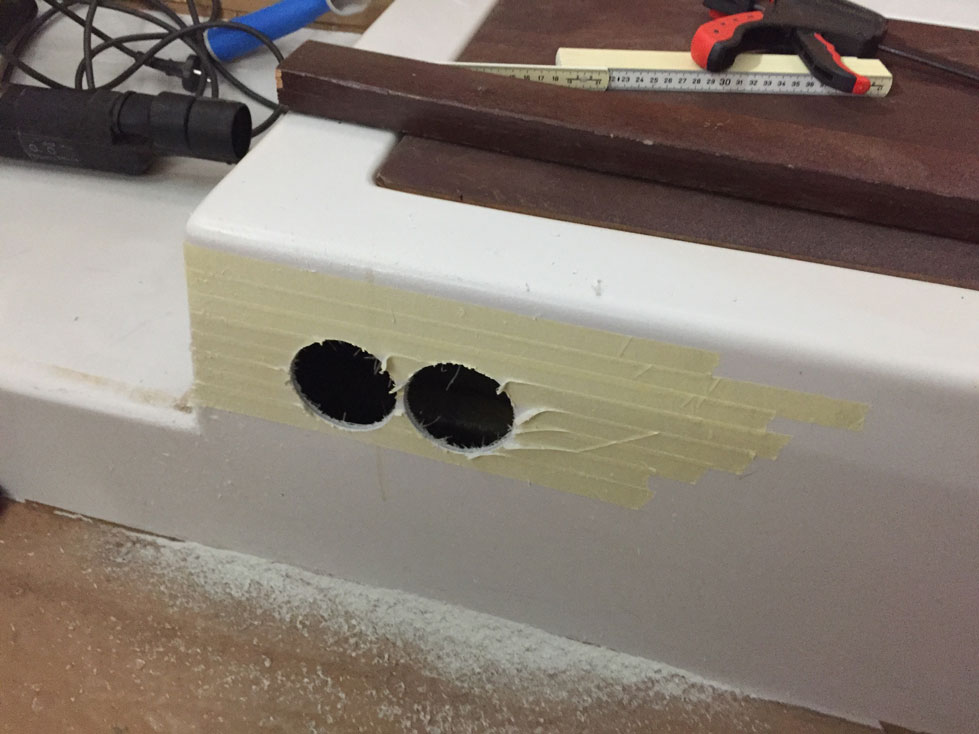
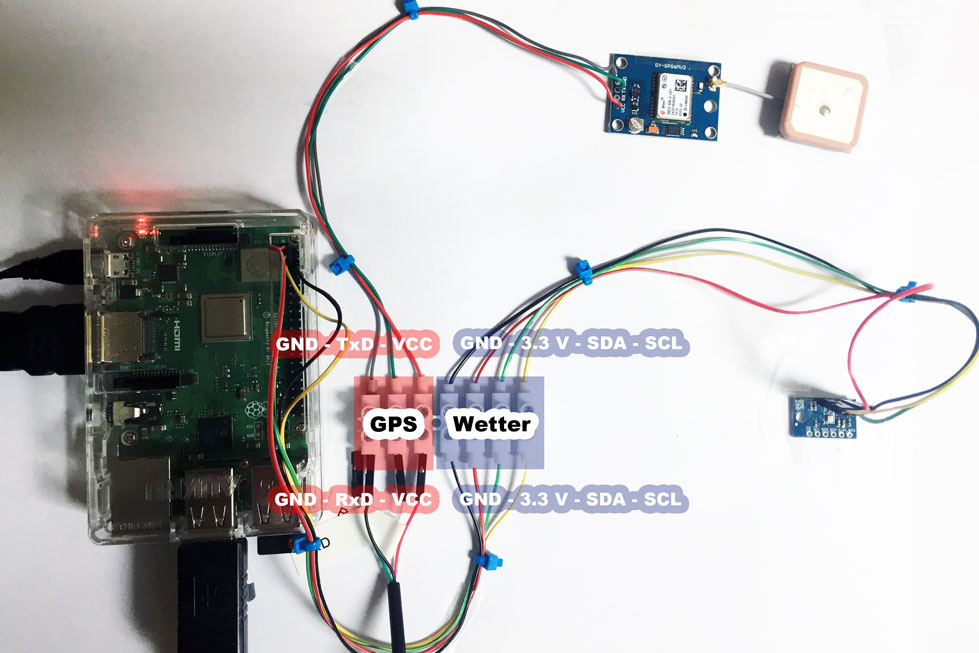
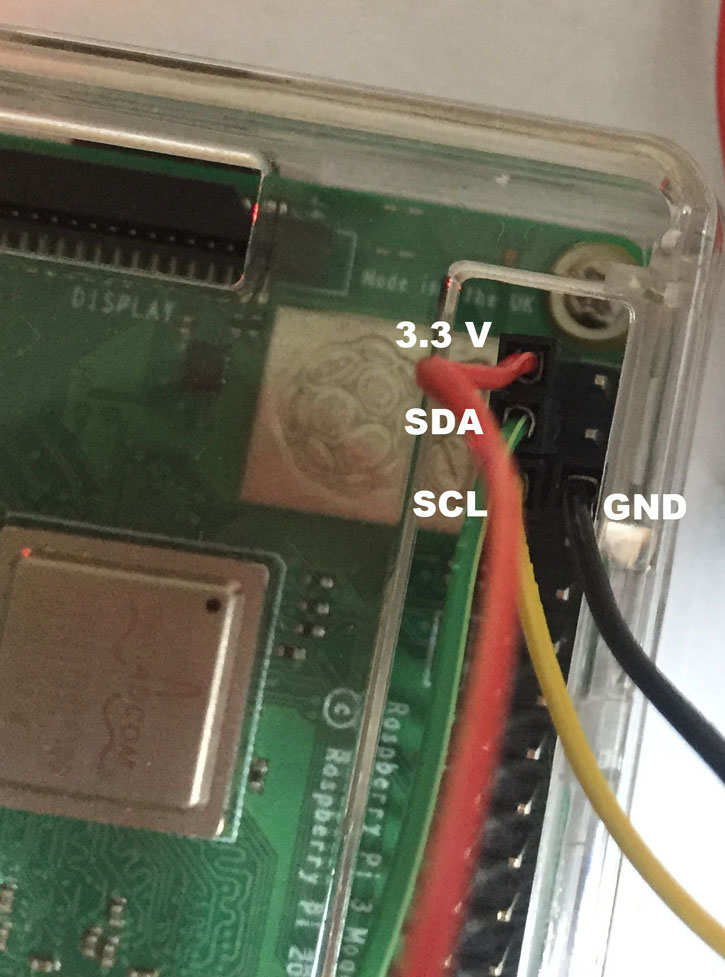
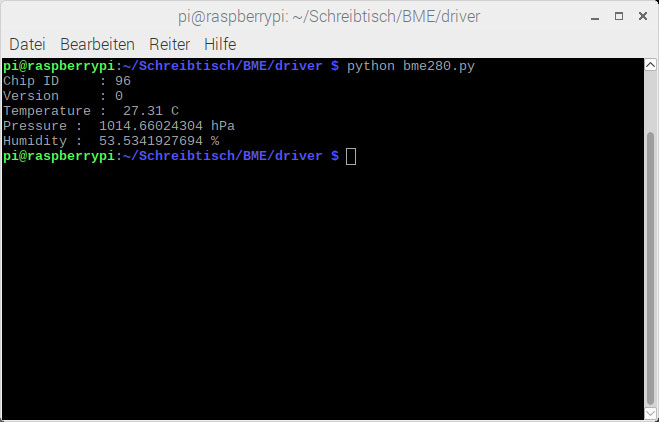
So langsam geht der Bordcomputer in die finale Phase. Er hat ein sauberes Gehäuse bekommen und auch die Sensoren sind sauberer verdrahtet. Fast alles fertig für den Einbau. Zum GPS Sensor habe ich noch einen Wettersensor (BME) aus China hinzugefügt. Kostete fast nichts und kann mittels fertigen Python Bibliotheken sehr einfach angesteuert werden. Angeschlossen wird der kleine Sensor direkt an die Pins des Raspberry (siehe Bilder).
Jetzt fehlt nur noch das selbstgeschriebene Python Programm mit einem schönen GUI, so dass alle Daten auf einen Blick verfügbar sind. Da ich lieber mit meinem Laptop programmiere, habe ich via sshfs und Fusion den Programmordner in das Filesystem eingebunden.
Nachdem das Boot komplett entkernt, das Cockpitholz entfernt und das Hubdach abgenommen wurde, beginnen langsam die Arbeiten für den Wiederaufbau. Vom Deck werden die meisten Beschläge entfernt, damit dieses geschliffen und gestrichen werden kann. Im Innenraum beginnen die ersten vorbereitenden Maßnahmen um die neue Elektrik zu verlegen.
Cockpit von oben
Gereinigte Backskisten
Einlaminieren einer Unterkonstruktion für die Elektrik
Um gewisse Planungssicherheit zu erlangen, machten wir uns seit geraumer Zeit Gedanken über unser zukünftiges Segelrevier. Es sollte anfängertauglich, nicht zu weit entfernt von Bonn, preiswert, aber trotz allem abwechslungsreich und auch Steigerungspotential haben. Daher tendierten wir sehr schnell zum niederländischen Friesland, welches mit seinem Seengebiet und Kanalverbindungen das ideale Revier für unsere Neptun 22 ist. Über den Anschluss ans Ijsselmeer und von dort an die Nordsee, sind auch anspruchsvolle Törns möglich.
Letztes Wochenende dann machten wir uns auf, Friesland und seine Häfen zu erkunden. Schon zu Hause fassten wir den Yachthafen Lutsmond am Slotermeer ins Auge. Das Slotermeer ist ein großer, aber auch flacher See in Südwest Friesland, an dem die friesischen Siedlungen Balk, Woudsend und Sloten liegen. Über Woudsend kann man über den friesichen See Fluessen nach Stavoren und über Sloten nach Lemmer. Sowohl Stavoren als auch Lemmer bieten direkten Zugang zum Ijsselmeer. Der Yachthafen Lutsmond liegt in direkter Nähe zu dem kleinen Ort Balk, der mit seinem kleinen Kanal und süßen kleinen Häusern sofort friesischen Charme versprühte. Der Yachthafen hat einen angeschlossenen kleinen Campingplatz und mit ca. 300 Liegeplätzen ausreichend Platz. Die Anlagen waren sehr modern und wir reservierten direkt fürs kommende Jahr einen Liegeplatz für Streuner.
Am ersten April 2019 ist es also soweit, wir werden Friesland/Ijsselmeer vom Slotermeer aus erkunden. Aber vorher muss unser Boot noch weiter fit gemacht werden 😉
Im zweiten Beitrag werde ich unserem Raspberry seine Position mitteilen. Klingt simpel, war es leider nicht.
Ursprünglich wollte ich ein gebrauchtes Garmin GPS III benutzen um über die NMEA 0183 Schnittstelle die Position auszulesen. Nach einiger Fummelarbeit mit alten Netzteilen, lief das GPS auch zuverlässig. Naiverweise dachte ich, dass ich mit der seriellen Schnittstelle des Pi einfach das Protokoll auslesen könnte. Leider erhielt ich nur Kauderwelsch. Okay die serielle Schnittstelle kann mal Macken haben, also auf die Schnelle einen USB Adapter auf RS232 Standard bestellt und wieder angeschlossen. Das Ergebnis blieb leider dasselbe. Nach tagelanger Frickelei (umstellen der Baudrate und und und) gab ich dieses Unterfangen frustriert auf.
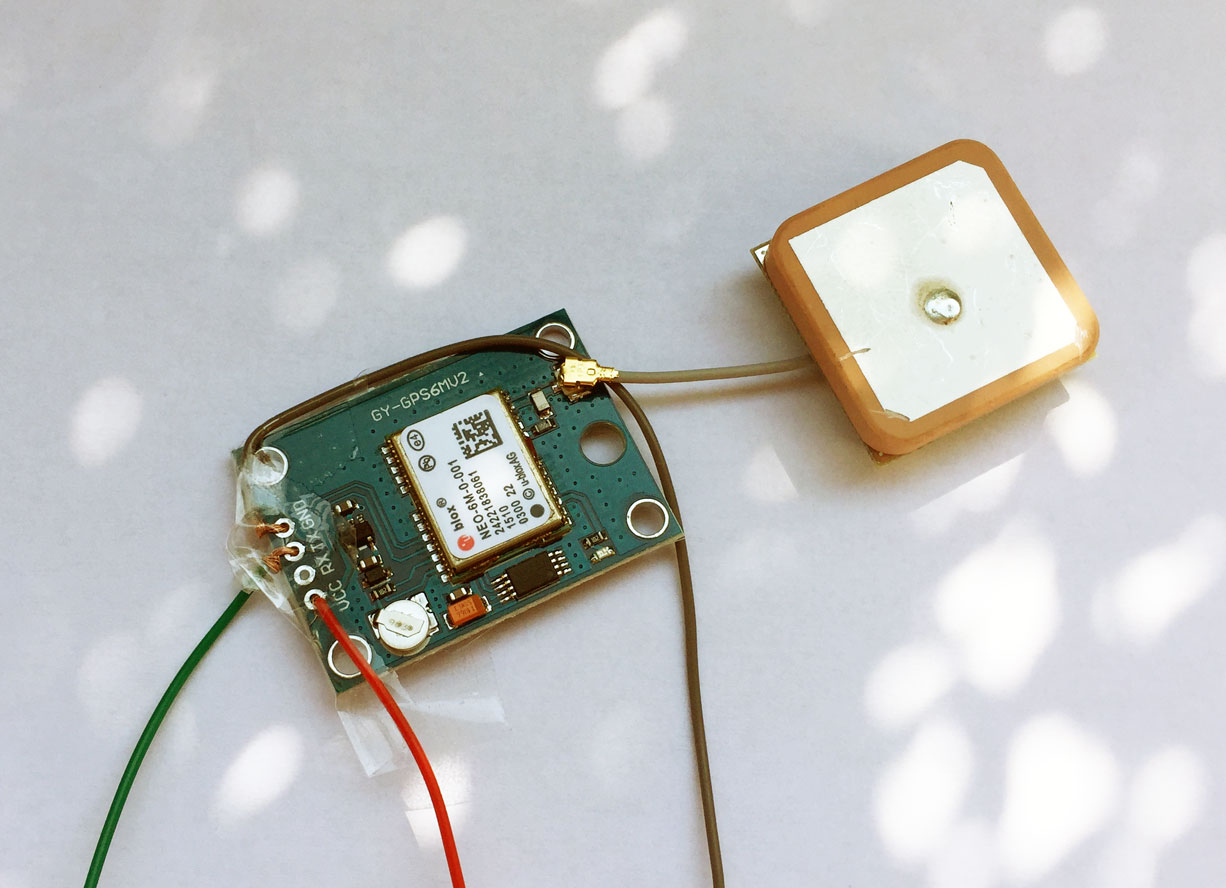
Was nun? Sollten wir den Raspberry Pi ohne GPS betreiben? Sprich nur Musik und Filme? Kein Kartenplotter, keine Geschwindigkeitsanzeige! Einen Versuch wollte ich noch starten und besorgte mir eine günstige Platine mit GPS Empfänger, die die Daten auch im NMEA Standard ausgibt. Ich entschied mich gegen eine geläufige GPS USB-Maus, da diese 1. teurer sind und 2. ohne das Raspberry ein Auslesen des Signals unmöglich wäre (z.B. für das Funkgerät). Den Anschluss der Platine und die Einbindung ins System beschreibe ich im Folgenden für potentielle Nachahmer ein wenig präziser.
Der GPS Empfänger hat vier Ausgänge (VCC, GND, TxD, RxD), wovon drei jetzt mit dem USB Serial Adapter verbunden werden müssen. VCC ist die Plusleitung und GND die Masse. TxD steht für Transmit Data und sollte mit der Receive (RxD) Buchse des Adapters verbunden werden. Mehr ist nicht zu machen.
Jetzt müssen wir noch die Ansteuerung unserer Schnittstelle im Pi herausfinden. Dafür können wir uns mit sudo dmesg in der Konsole alle Systemnachrichten anzeigen lassen. Irgendwo taucht der USB Serial Adapter auf und auch der Alias mit dem er angesprochen werden kann. Bei mir war es /dev/ttyUSB0. Zuerst sollten wir die Baudrate checken. Dafür können wir mit dem Befehl sudo stty -a -F /dev/ttyUSB0 alle Informationen zu unserer Schnittstelle auslesen. Stimmt die Baudrate mit der vom GPS Empfänger überein, ist alles Gut. Andererseits können wir mit stty auch die Baudrate auf die geforderte Einstellung setzen. Als nächstes sollten wir überprüfen, ob die Schnittstelle auch echte NMEA Sequenzen empfängt. Mit cat /dev/ttyUSB0 können wir die empfangenen Daten anzeigen lassen. Passen die soweit, können wir damit fortfahren, die GPS Daten für andere Programme sichtbar zu machen.
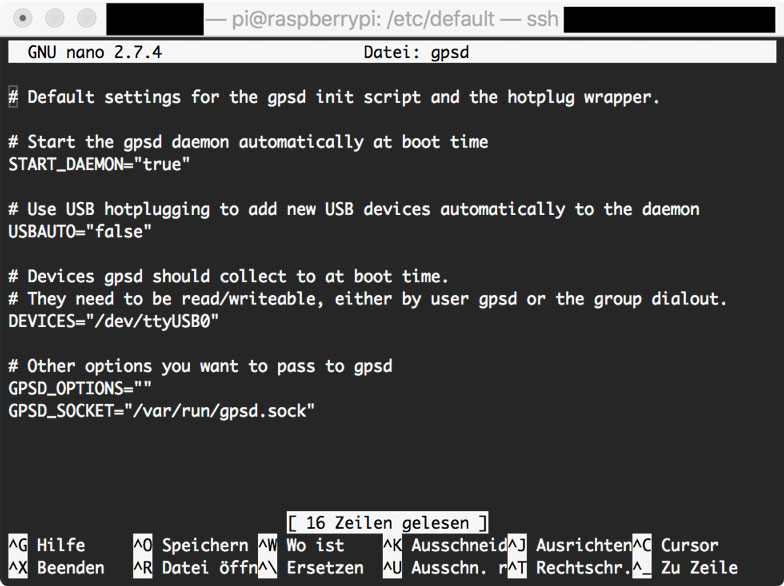
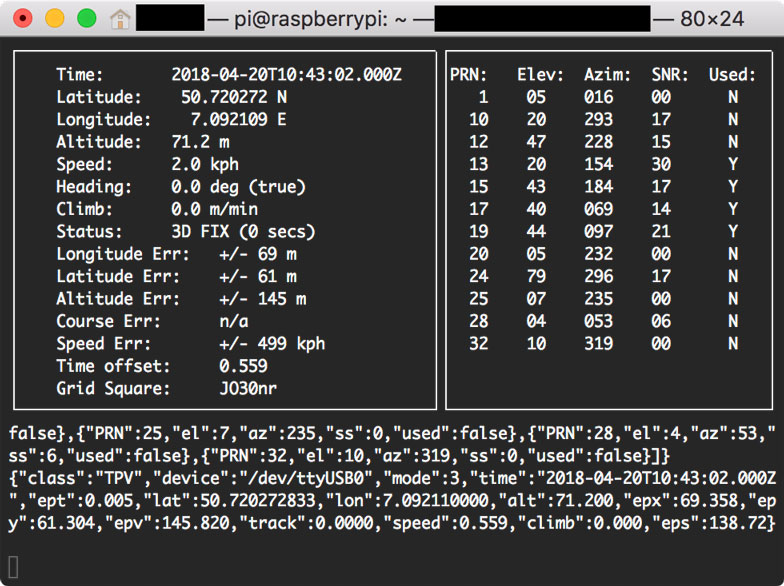
Dafür bietet sich ein Hintergrunddienst (Daemon) an, der permanent die serielle Schnittstelle ausliest und die Daten von anderen Programmen angefordert werden können. Am weitesten verbreitet ist der GPS Daemon gpsd. Das Einpflegen der Position in OpenCPN und das Zugreifen von selbstgeschriebenen Programmen mittels Pythonbibliotheken ist damit im Nu erledigt. Mit sudo apt-get install gpsd gpsd-clients ist der Daemon fix installiert. Um die korrekte Schnittstelle zuzuweisen, muss noch die Konfiguartionsdatei mit sudo nano /etc/default/gpsd geändert werden. Im unteren Bild sieht man meine Einstellungen. Nach einem Neustart kann man mit dem Hilfsprogramm cgps die korrekte Funktionsweise testen. Jetzt sollte man die eigene Position angezeigt bekommen.
Zum Schluss binden wir den Empfänger noch in OpenCPN ein, was mithilfe des Daemons kein Problem mehr sein sollte. Unter Options->Connections->Add Connection eine Network Verbindung mit GPSD und der Adresse localhost erstellen. Schon hat auch OpenCPN die erforderlichen Daten und zeigt die aktuelle Bootsposition an. Nützlich ist hier auch das Dashboard Plugin, welches zusätzlich noch die Satelliten anzeigt (siehe Bilder).
Alle Grundanforderungen an unseren Bordcomputer sind nun erfüllt, fehlt noch der nahezu unsichtbare Einbau in Streuner. Allerdings finde ich Gefallen an dem kleinen Einplatinencomputer und habe eine Idee die Funktionen noch zu erweitern.